Power Wheelchair Control System
Gesture-based control system for power wheelchair users with partial paralysis.
# TL;DR
- Sensor filtering and smoothing
- PID control
- Accessible usage and control
- Stepper motor control
- Gesture recognition
The BeeAble is a gesture-based control system designed to interoperate with existing power wheelchair hardware. For the project, I created reusable software modules for sensor filtering and smoothing, PID control of stepper motors, driver code for the stepper motors, and gesture recognition with a 3-axis accelerometer.
# Problem Definition
For this design project, we were tasked with creating any Raspberry Pi-powered device that fuses sensors and actuators to create some useful system. Besides that, target demographics and the problem definition were completely open-ended. Naturally, this allows for a heavy degree of freedom (which was the main thing I loved about this project), but it does mean my team and I had to spend a lot of time brainstorming and researching to find a project that we were all passionate about.

After a week or two of brainstorming, we settled on increasing the accessibility to mobility. We realized that although there are solutions that exist, they are often prohibitively expensive or cannot be used by patients in extenuating circumstances. Since our team believed that everyone should have the right to move around freely and independently, we wanted to create a solution that was affordable, easy to use, and adaptable to existing hardware and various use cases.
# Solution
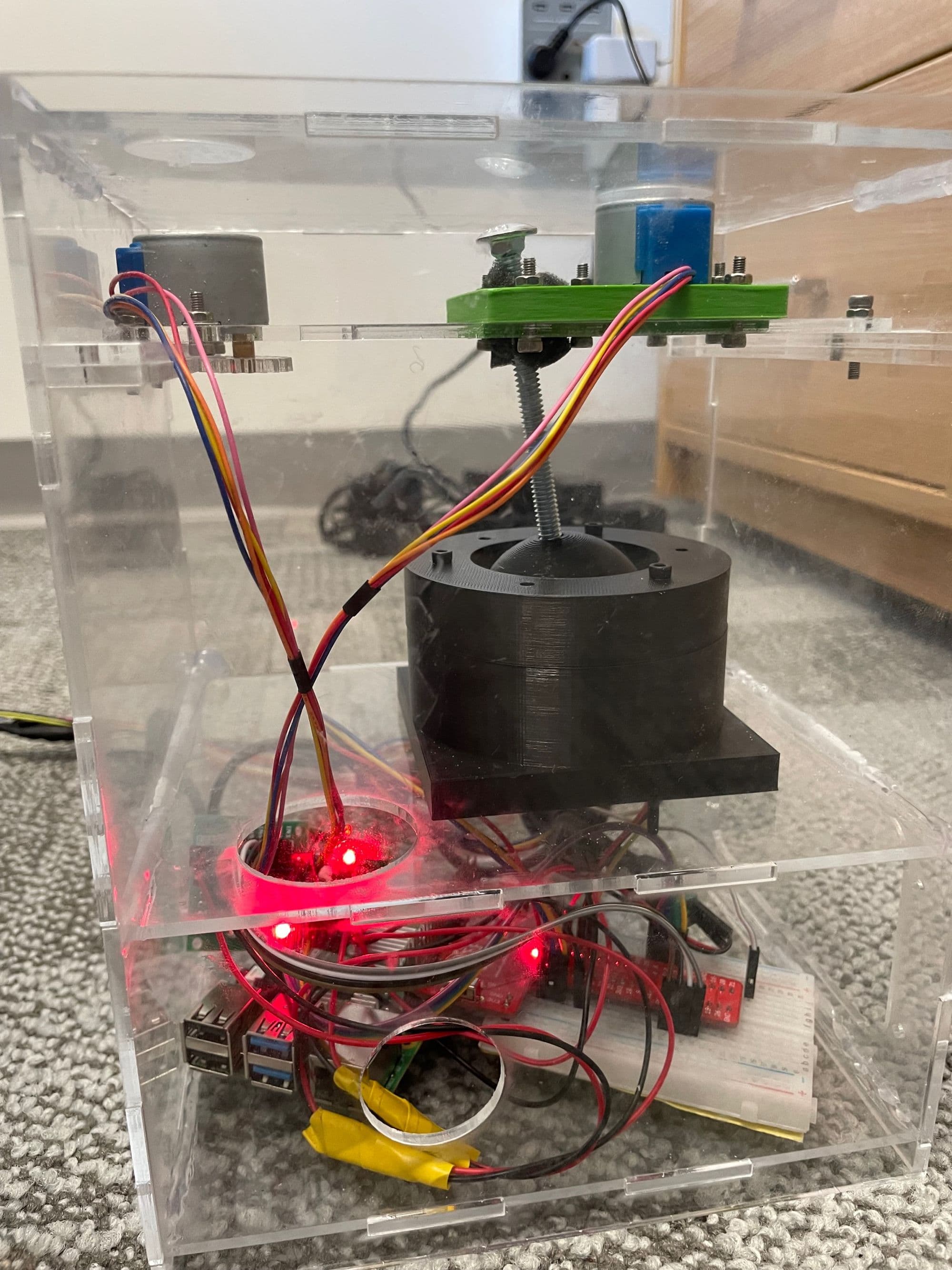
We created the BeeAble, a system designed to interoperate with an existing joystick control system on a power wheelchair. The system uses an accelerometer to detect gestures made by the user, which are then translated into commands that move the joystick in the desired direction. We also added haptic feedback to provide information about the state of the system, choosing it over auditory or visual methods to accommodate users with vision, hearing, or cognitive impairments.
# Contributions
## Sensor Filtering and Smoothing
Because the values from the accelerometer can be noisy, I implemented software filtering and smoothing of the sensor data. This was achieved using an exponential moving average, which emphasizes the weight of the most recent data points. We read values with a moving window, smoothed them, and used the smoothed values to determine the position of the accelerometer and subsequently what gesture the user was making.
## PID Control
We cannot rely on naive control systems like bang-bang control to move the wheelchair, lest we risk jerky and unpredictable movements. Instead, I implemented a simple PID control system for stepper motor control. We compute the error between the desired position and the current position, and we use this to smoothly move the wheelchair in the desired direction.
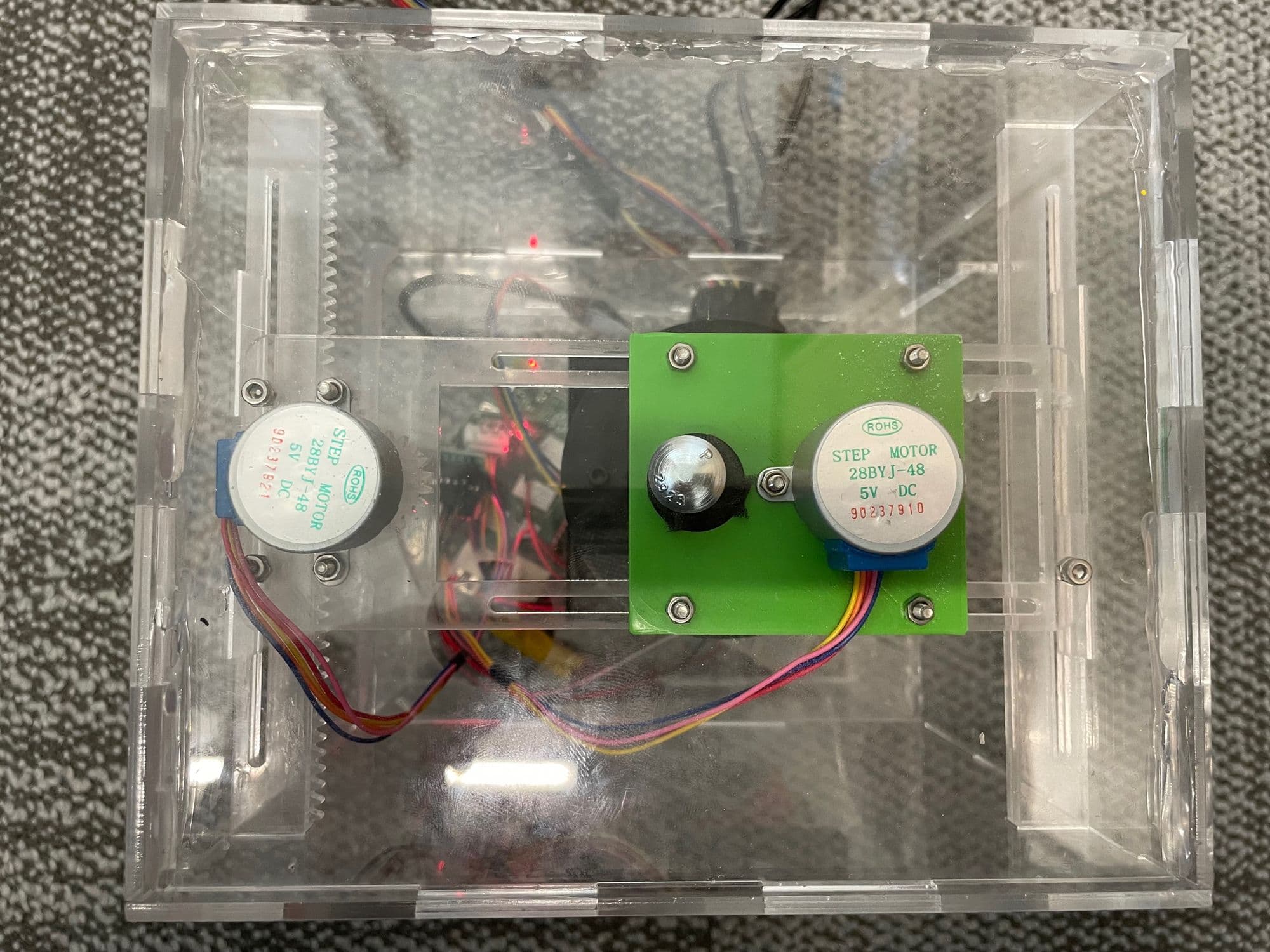
## Stepper Motor Driver Code
The stepper motors we were using did not come with a library or driver code, but they are simple enough that we could write our own. These motors do not have encoders, which made it difficult to determine the position of the motors at times. Adapting the code to support micro-stepping helped, but I did wish we had better hardware to create a more robust solution.
## Gesture Recognition
Honestly, gesture recognition was extremely basic due to hardware limitations and the scope of the project itself. We basically slapped the accelerometer onto a hat and used movements that were held for a certain amount of time to determine the direction of movement. In theory, the code could be adapted to recognize complex gestures with advanced signal processing or machine learning models. This would allow more nuanced control and better adaptability to the user's needs.
# Reflection
Of every design project I've done in my first year, this one was by far the most interesting and rewarding. The open-ended nature of the project allowed me to explore my interests without being constrained by a rubric or a set of requirements. I also loved working with the team I was assigned to; we all had different strengths and weaknesses, but we were able to work together to create something that we were all proud of.